電気流体力学と静電気力による推進装置
EHD推進機のドローン化について
2021年 9月6日
2021年 10月13日
2021年 12月30日
2023年 5月18日
2024年 1/5
2024年 8/21
2024年 10/28
2025年 6/25
2025年 10/6
2025年 11/1
古い情報は破棄します。重要な情報だけ残していきます。
キーワード; 金属の分極、電荷、静電容量、電界、大気イオン密度、弱電離プラズマ
Keyword; EHD, Electrostaic, Propulsion, Charges, Capacitance, Polarization effect in Asymmetrical Metal Structure, Plasma
ここでは、長く開発してきたEHD推進デバイスのドローン化実現の可能性に関して説明を行う。
装置の試作で、お皿の様な一体型オール金属体を持つEHDデバイス開発を目指します。
我々が作製しているデバイスは、基本的に板を水平方向に配置した形状を取り、電荷蓄積量と浮上力を改善させることに成功している。
ここで用いられる金属は、ただ単純な金属構造でなく多層化してあり、中心の放射状電極にはただの平面でなく放射状構造に意味がある。
多層化については、以前に述べた。
当たり前だが、この構造では、イオン風は中心でを通り抜けができない。もし、イオン推進であれば、推力が低下し浮上はできない。
実現可能性が高いパラメータ
EHDデバイスへの電源搭載を可能とする。
EHD推進デバイス: 円形 放射状 直径 1mから0.5m 上記写真の改造型
印加電圧 100kV 過去の実験データより
浮上力 20g
高電圧電源の詳細 : 小型テスラコイル(というよりも、無線送電用の空芯トランス)
単一FET駆動、発振回路
CW整流回路 出力電圧 100kV
総重量: 5g
パルス化: 外部コンデンサを短絡放電
個々の技術がすでに確立されているため実現可能性は非常に高い。
しかし、上記が完成したとしてもドローンとしての動作のみに限定されそう。
2021. 12. 30 追記
ご報告です。 超軽量な高電圧発生装置を開発し、それをEHDデバイスに搭載しました。
EHDデバイスに搭載した状態で高電圧を発生し、その高電圧で浮上させることに成功しました。
まだ長時間は浮上させることができませんが、ワイヤー1本で上空へ飛ばすことが可能となりました。
今後、TCも装置に搭載します。

多層フレーム採用EHDデバイス 25cmL
テスラコイル動作EHD推進器の実験動画
多層フレーム採用EHDデバイス 25cmL(2)
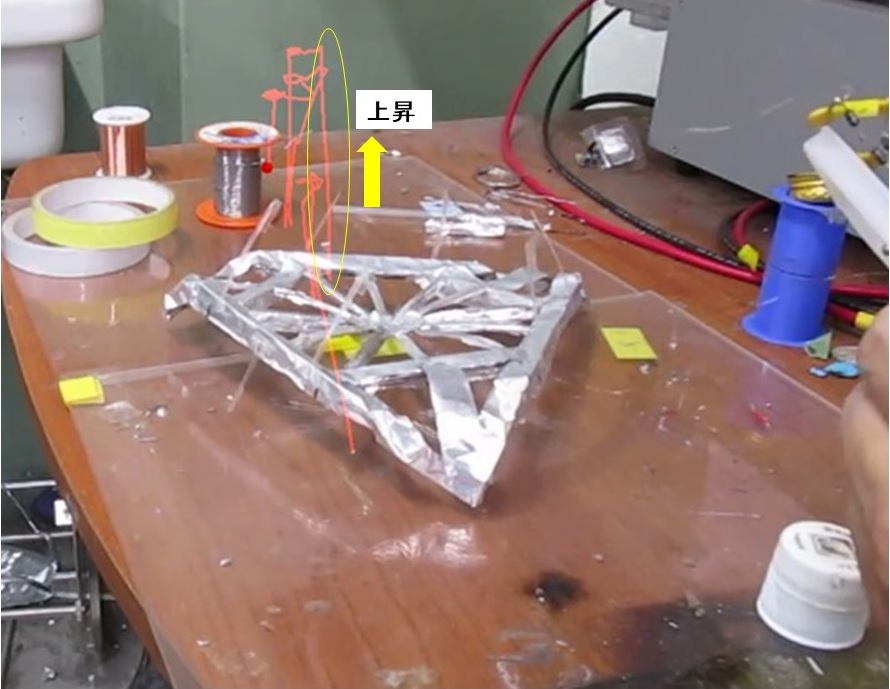
以下の動画が、このEHD推進デバイスの浮上特性を良く現している。
地球の重力に反発する様な挙動を示している動画です。
地球から出る自然の流れに乗るように、エレベータに乗った様な感じで水平方向の姿勢を変えず、そのままスーっと鉛直上方向に上昇していきます。
別の言い方をすると、空間にEHD推進装置が張り付いており、空間とともに運動している感じを受ける。いわゆるフィールド推進理論が適していると考えます。
ドローンとかヘリコプター等ではありえない話で、根本的に特性は異なります。
デバイスの基本設計は、水平方向にできる限り広い金属面を設けることです。
EHD推進器の実験動画
2024.10.28 三角形小型 側面ストライプ電極採用 20cmφ
三角形小型 実験動画

2024.11.02 円形小型 側面ストライプ電極 20cmφ
円形小型 実験動画
2025.5.19 円形大型 側面ストライプ電極+トップハット+中心柱 30cmφ
2025. 7.31 円形中型 30cmφ
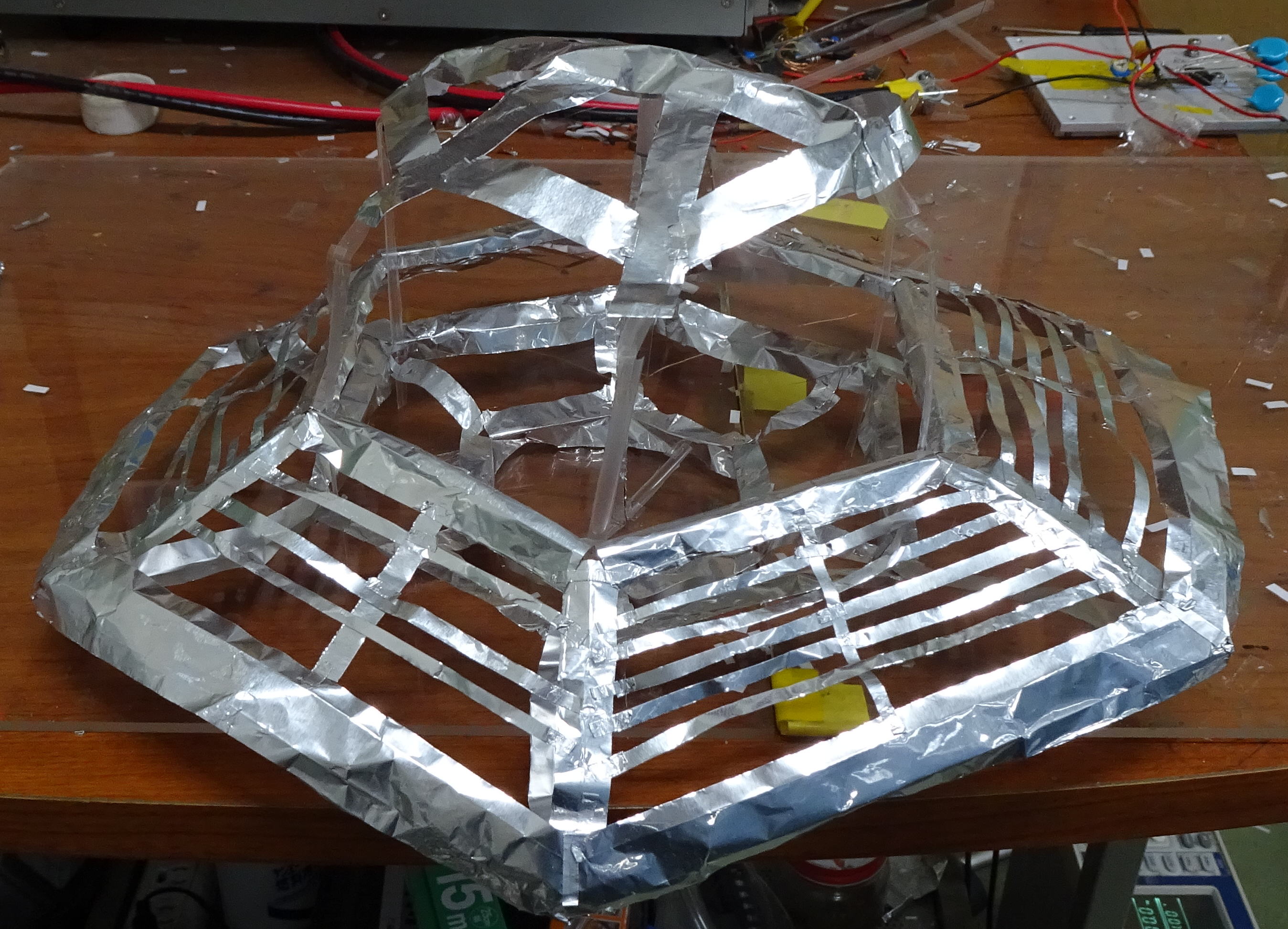
ポイント:底面に多重電極構造を配置
底の構造がとても大切
ここで、推力を発生することで、底が水平に保たれるため、
姿勢がかなり安定化する。
2025. 9.09 円形大型 40cmφ
2025. 9.17 円形大型 30cmφ
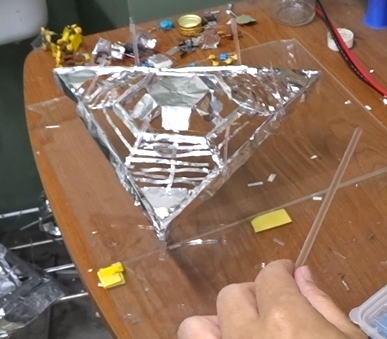
2025.9.23 円形_中央ドームタイプ
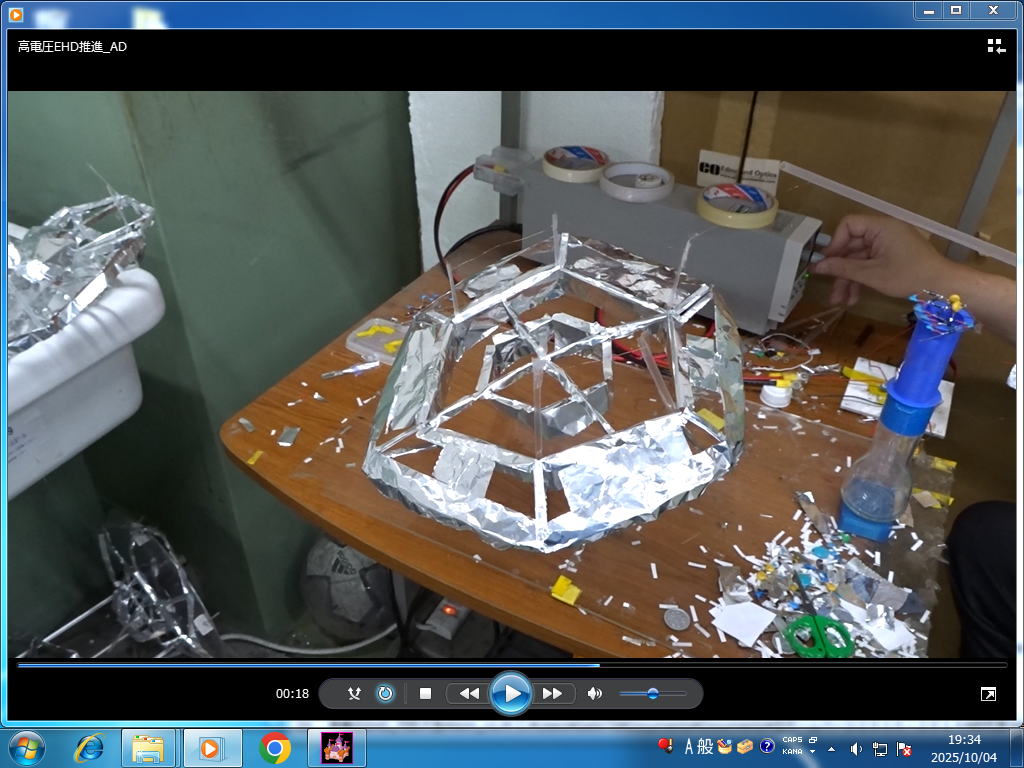
2025.10.04 円形大型 25cmφ
円形大型 実験動画_高度制御11
2024. 8. 21 追記
現状の報告です。
EHD推進デバイスの推進力の改善を進めています。
CW回路の高電圧化を進めています。高電圧を使用すると大きな推進力と高い効率を得られることがすでに明らかになっています。
この課題については検討中です。
同時にEHDデバイスの大型化も進めています。
しかし、上記を一気に片付けることは不可能です。1つずつ課題をクリアしていきます。
段階的に開発を行います。
最初に実現したこと
CW高電圧回路のEHDデバイスへの搭載。
CW回路を最小化 つまり、段数を減少させて、なおかつ1段の高電圧化を計りました。
この段階で、1ワイヤーでTCトップロードから高周波高電圧の供給が可能です。
図 EHDデバイス 高電圧発生回路搭載 実例
図 EHD推進デバイス 高電圧発生回路 重量1.5g。 浮上力 (金属4g+余剰推力3g) 7g 静止の場合。
1ワイヤーでTCから高周波電圧の供給が可能。EHDデバイスの浮上高さの調整可能。
現状では、上記EHDデバイスを使用して1ワイヤーでのエネルギー供給・制御が可能です。
次の目標は、結構小さくなったTCコイルの搭載です。
2025. 7. 3 追記
高電圧発生回路搭載の報告です。
CWの改良を行い、市販の高耐圧コンデンサを用いた回路を作製しました。
CWの4段構成で、重量は2gまで減らすことができました。
上記高電圧発生用CW回路をEHD推進デバイスに搭載し、浮かすことができることを確認しました。
この結果にはどういう意味があるかというと、ほぼ試作した全てのEHD推進デバイスにCWが搭載できることを意味します。大変でしたが、ここまで進みました。
次は、TC搭載です。
CW回路
2025. 10.06 追記
動画 CW回路搭載 駆動電源として
中央部にCW回路を搭載し、そこから高電圧を供給して浮上しています。
電源には効果(浮上力)が働かなくて重力がかかる。
したがって、中央に配置しないとバランスが崩れて浮上できない。
2025. 11.01 追記
EHD推進デバイスの設計思想の変更
EHD推進デバイスの大型化と電源の関係について述べます。
ある高電圧を発生することができる同じ電源をどんどん大型のEHD推進システムに交換しながら接続していくとします。
あるところまで大きい推進デバイスの推進力は増大するのですが、ギャップ間隔を同じにして実験を行いますと、浮上力が低下することがわかりました。
EHDデバイスの上リング直径を大きくしても、装置全体は浮くんだが、中央部における浮上効果が弱くその浮力が小さくなるために、だんだん余剰の浮上力が低下していきます。
今の状態では、直径40cmのところで推進力低下が生じます。50cmが限界。これ以上のサイズが作れていません。
大型の推進デバイスを浮上させるためには、放電ギャップを大きくしていく必要があります。すなわち、それは、電源電圧の高電圧化を意味します。
しかし、高電圧化には限界がありますし、また、電源装置の重量もどんどん大きくなってきますので。
上記の高電圧化を回避するために、推進装置のシステム改造を提案します。
具体的には、大型化の際、外リングの推進装置に加え、補助的な推進デバイスを複数個追加したシステムをここに提案し実験を行いました。
図、 推進力補助装置付きEHD推進デバイス

2025.11.03 推進力補助装置付きEHD推進デバイス
円形大型 32cmφ 3基推進力補助装置付き
円形大型 実験動画_高度制御12
すでに実験を終え、うまく動作することを確認しました。
これでかなりの重量物を搭載することが可能となりました。ただ、大きな電力が必要となりますが。後ほど詳細を説明します。
2025. 12.20 追記
2025.12.20 推進力補助装置付きEHD推進デバイスに関する進展
球体型コンデンサ(浮上デバイス)の開発
前回、上記の様に付加的浮上力増力装置の提案をした。
しかし、ふと考えると、コンデンサが装置に収まらない。ストローに張り巡らしたワイヤーが出っ張って、縦方向にEHD推進装置に収まらないことは明白であった。
推進力補助装置付きEHD推進デバイスを改造する必要、すなわち、ワイヤーが出っ張らない新たな球体型コンデンサを開発する必要があった。開発した実物を下記に記す。

新規に開発した球体型コンデンサ
球形 実験動画 v1
球体型コンデンサ3基を搭載した大型EHD推進デバイス
円形大型 実験動画_高度制御 AMPv2
2026. 5. 29 追記
EHD推進デバイスの設計思想の変更(2)
EHD推進デバイスの設計思想の変更し、2重構造化を行った。
上と下でダブルで推進力を発生する。

2重構造大型EHD推進デバイス その1

2重構造大型EHD推進デバイス その2
図、中心にTCを配置。 底面推進装置。
参考文献
Taku Saiki,
"Ehd and Electrostatic Propulsion Device Mounted with High Voltage Generator", viXra.org e-Print archive, 2022年1月10日viXra:2201.0042
発表論文
Taku Saiki,
“Analysis for Levitation of EHD and Electrostatic Propulsion Device in Direction of Gravity using Optical Flow Method”,
J. of Electrical Electronics Engineering, (2024) Vol.3(1) pp.1-12.
学会発表
佐伯 拓
コンピュータ画像でのEHDと静電気による推進デバイスの浮上特性解析
第71回応用物理学会春季学術講演会 2024年 3/25
東京都 東京都市大学 世田谷キャンパス、25p-12C-8
